Сензорът в общия смисъл е устройство, което преобразува една физическа величина в друга, удобна за обработка, предаване или последващо преобразуване. По правило първата величина е физическа, не подлежи на директно измерване (температура, скорост, преместване и др.), а втората е електрически или оптичен сигнал. Ниша в областта на измервателните уреди е заета от сензори, чийто основен елемент е индуктор.
Съдържание
Как работи индуктивният сензор и как работи
Според принципа на действие индуктивните сензори са активни, тоест изискват външен генератор за работа. Той осигурява сигнал с дадена честота и амплитуда към дросела.
Токът, преминаващ през завоите на намотката, създава магнитно поле. Ако проводим обект навлезе в магнитното поле, параметрите на намотката се променят.Остава само да се коригира тази промяна.
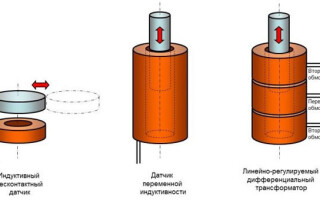
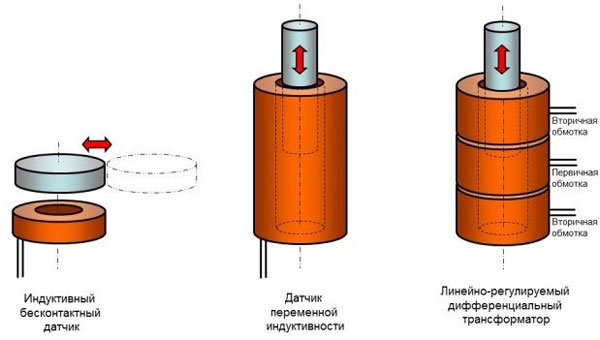
Простите безконтактни сензори реагират на появата на метални предмети в близката зона на намотката. Това променя импеданса на бобината, тази промяна трябва да се преобразува в електрически сигнал, да се усили и (или) да се фиксира преминаването на прага с помощта на схема за сравнение.
Сензори от друг тип реагират на промени в надлъжното положение на обекта, който служи като сърцевина на бобината. Когато позицията на обекта се промени, той се движи навътре или извън намотката, като по този начин променя своята индуктивност. Тази промяна може да бъде преобразувана в електрически сигнал и измерена. Друга версия на такъв сензор е, когато обект се приближава към бобината отвън. Това води до намаляване на индуктивността поради ефекта на земята.
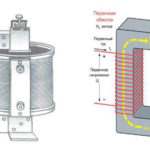
Друга версия на индуктивния сензор за изместване е линейно регулируем диференциален трансформатор (LVDT). Това е композитна намотка, изработена в следния ред:
- вторична намотка 1;
- първична намотка;
- вторична намотка 2.
Сигналът от генератора се подава към първичната намотка. Магнитното поле, създадено от средната намотка, индуцира ЕМП във всяка от вторичната (принцип на трансформатора). Ядрото, когато се движи, променя взаимната връзка между намотките, променяйки електродвижещата сила във всяка от намотките. Тази промяна може да бъде фиксирана от измервателната верига. Тъй като дължината на сърцевината е по-малка от общата дължина на композитната намотка, позицията на обекта може да бъде недвусмислено определена от съотношението на ЕМП във вторичните намотки.
На същия принцип - промяна в индуктивната връзка между намотките - е изграден сензор за завъртане.Състои се от две коаксиални намотки. Сигналът се прилага към една от намотките, ЕМП във втората зависи от взаимния ъгъл на въртене.
От принципа на действие е очевидно, че индуктивните сензори, независимо от дизайна, са безконтактни. Те работят на разстояние и не изискват директен контакт с контролирания обект.
Предимства и недостатъци на индуктивните сензори
Предимствата на индуктивните сензори включват преди всичко:
- надеждност на дизайна;
- липса на контактни връзки;
- висока изходна мощност, която намалява влиянието на шума и опростява веригата за управление;
- висока чувствителност;
- способността за работа от източници на променливо напрежение с индустриална честота.
Основният недостатък на индуктивните сензори е техният размер, тегло и производствена сложност. За навиване на бобини с дадените параметри е необходимо специално оборудване. Също така, необходимостта от точно поддържане на амплитудата на сигнала от главния осцилатор се счита за минус. Когато се промени, зоната на чувствителност също се променя. Тъй като сензорите работят само на променлив ток, поддържането на амплитудата се превръща в определен технически проблем. Директно (или чрез понижаващ трансформатор) няма да е възможно сензорът да се свърже към домакинска или индустриална мрежа - в него колебанията на напрежението в амплитудата или честотата могат дори да достигнат 10% в нормален режим, което прави точността на измерване неприемлива .
Също така, точността на измерването може да бъде повлияна от:
- магнитни полета на трети страни (екранирането на сензора е невъзможно въз основа на принципа на неговата работа);
- ЕМП датчики на трети страни в захранващи и измервателни кабели;
- производствени грешки;
- грешка в характеристиката на сензора;
- хлабини или деформации на мястото на монтаж на сензора, които не влияят на цялостната производителност;
- зависимост на точността от температурата (параметрите на намотката се променят, включително нейното съпротивление).
Неспособността на индуктивните сензори да реагират на появата на диелектрични обекти в тяхното магнитно поле може да се отдаде както на предимства, така и на недостатъци. От една страна, това ограничава обхвата на тяхното приложение. От друга страна го прави нечувствителен към наличието на мръсотия, мазнини, пясък и др. върху наблюдаваните обекти.
Познаването на недостатъците и възможните ограничения в работата на индуктивните сензори позволява рационално използване на техните предимства.
Обхват на индуктивните сензори
Индуктивните сензори за близост често се използват като крайни превключватели. Такива устройства станаха широко разпространени:
- в системи за сигурност, като сензори за неразрешено отваряне на прозорци и врати;
- в телемеханичните системи, като сензори за крайно положение на възли и механизми;
- в ежедневието в схемите за индикация на затворено положение на врати, щори;
- за преброяване на обекти (например придвижване по конвейерната лента);
- за определяне на скоростта на въртене на зъбните колела (всеки зъб, минавайки покрай сензора, създава импулс);
- в други ситуации.

Ъгловите енкодери могат да се използват за определяне на ъглите на въртене на валове, зъбни колела и други въртящи се компоненти, както и абсолютни енкодери. Също така такива устройства могат да се използват в металорежещи машини и роботизирани устройства заедно с линейни сензори за положение. Където трябва да знаете точно позицията на възлите на механизмите.
Практически примери за внедряване на индуктивни сензори
На практика дизайните на индуктивните сензори могат да бъдат реализирани по различни начини. Най-простото изпълнение и включване е за двужилен единичен сензор, който следи наличието на метални предмети в зоната му на чувствителност. Такива устройства често се правят на базата на E-образно ядро, но това не е основен момент. Такова изпълнение е по-лесно за производство.
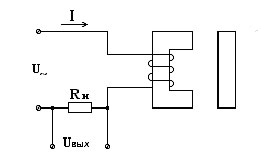
Когато съпротивлението на бобината се промени, токът във веригата и спадът на напрежението в товара се променят. Тези промени могат да бъдат ангажирани. Проблемът е, че съпротивлението на натоварване става критично. Ако е твърде голям, тогава промените в тока, когато се появи метален обект, ще бъдат сравнително малки. Това намалява чувствителността и шумоустойчивостта на системата. Ако е малък, тогава токът във веригата ще бъде голям, ще се изисква по-устойчив сензор.
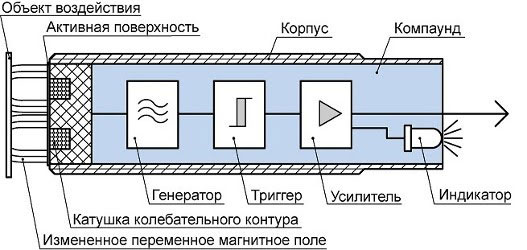
Следователно има дизайни, при които измервателната верига е вградена в корпуса на сензора. Генераторът генерира импулси, които захранват индуктора. Когато се достигне определено ниво, спусъкът се задейства, превключвайки от състояние 0 на 1 или обратно. Буферният усилвател усилва сигнала по отношение на мощността и (или) напрежението, запалва (гаси) светодиода и извежда дискретен сигнал към външната верига.
Изходният сигнал може да се формира:
- чрез електромагнитно или полупроводниково реле – нулево или едно ниво на напрежение;
- "сух контакт" електромагнитно реле;
- отворен колектор транзистор (структури n-p-n или p-n-p).
В този случай са необходими три проводника за свързване на сензора:
- храна;
- общ проводник (0 волта);
- сигнален проводник.
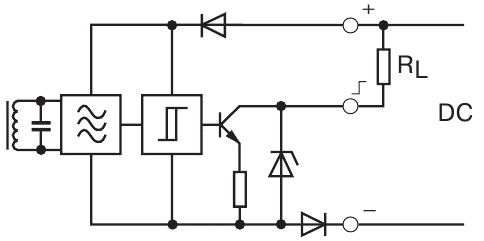
Такива сензори могат да се захранват и от DC напрежение. Импулси към индуктивността те се формират с помощта на вътрешен генератор.
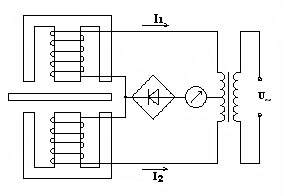
За наблюдение на позицията се използват диференциални енкодери. Ако контролираният обект е симетричен спрямо двете намотки, токът през тях е еднакъв. Когато някоя намотка се измести към полето, възниква дисбаланс, общият ток престава да бъде равен на нула, което може да бъде записано от индикатор със стрелка в средата на скалата. Индикаторът може да се използва за определяне както на величината на изместването, така и на неговата посока. Вместо указателно устройство можете да използвате схема за управление, която при получаване на информация за промяна на позицията ще подаде сигнал, ще предприеме мерки за подравняване на обекта, ще направи корекции в технологичния процес и др.

Сензорите, направени на принципа на линейно регулируеми диференциални трансформатори, се произвеждат под формата на завършени конструкции, които представляват рамка с първични и вторични намотки и прът, движещ се вътре (може да бъде пружиниран). Извеждат се проводници за изпращане на сигнал от генератора и отстраняване на ЕМП от вторичните намотки. Контролиран обект може да бъде механично прикрепен към пръта. Може да се направи и от диелектрик - за измерване има значение само позицията на стеблото.
Въпреки някои присъщи недостатъци, индуктивният сензор затваря много области, свързани с безконтактно откриване на обекти в пространството.Въпреки постоянното развитие на технологиите, този тип устройства няма да напуснат пазара за измервателни уреди в обозримо бъдеще, тъй като работата му се основава на основните закони на физиката.
Подобни статии: